
※本記事の初版は2014年6月5日となる。
準備
まずはチュートリアルで、離陸前、滑走路に進入したところでフライトを保存しておきます。
MJC8 Q400では、パネルステートの読み出し機能が無く、PMDGで言うところの”ショート”のステートからスタートします。
※バッテリONでエンジン未始動。
離着陸訓練では、毎回これを実施するのは面倒です。
また燃料の搭載も同様です。
チュートリアルでは近距離路線で重量も少ない便のシチュエーションのため、再利用にちょうど良いのです。
全体的にこの設定がなされている前提で記載しています。
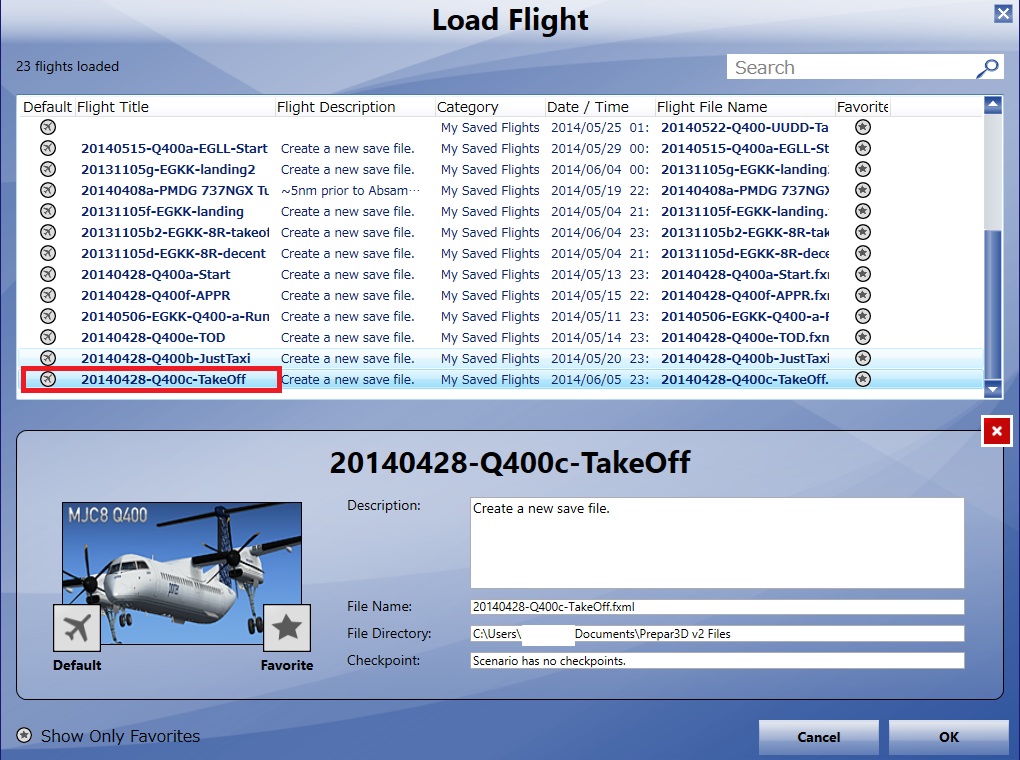
保存したフライトのロード
以降の記載はPrepar3Dv2ベースで記載しますが、FSXでもほぼ同様です。
フライトのロードをします。
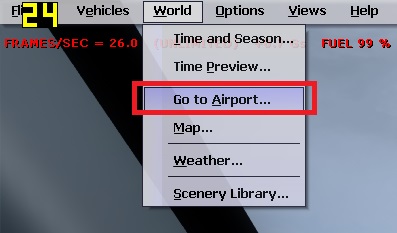
次にWorldメニューからGo To Airportを選択します。
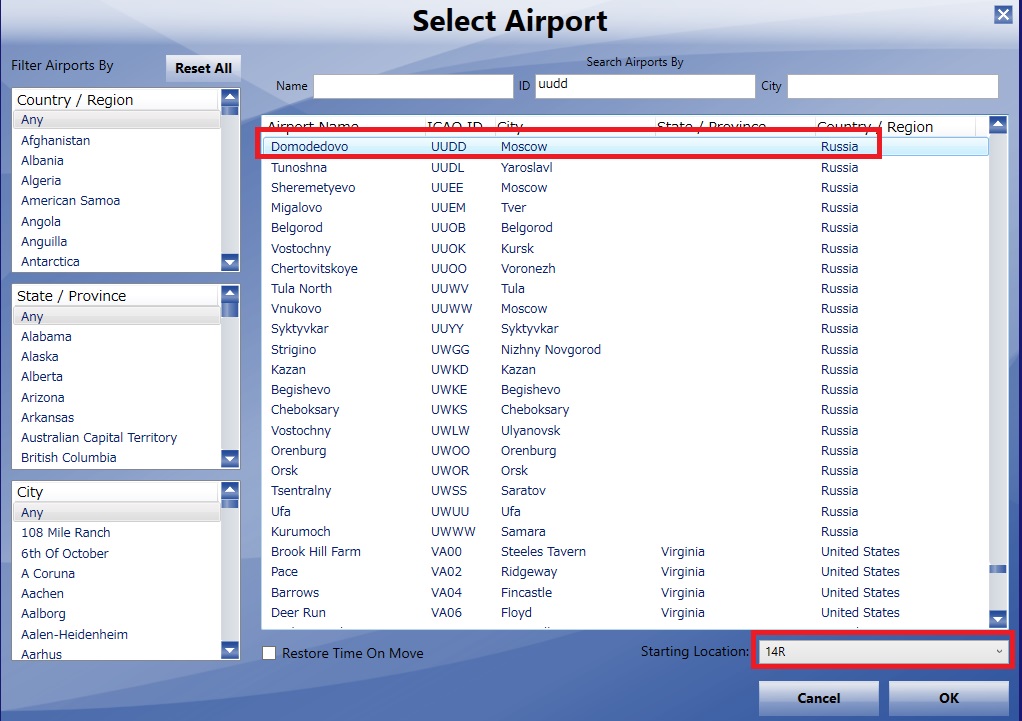
そして訓練を行いたい空港と離陸する滑走路を選択します。
今回の例では、モスクワのドモジェドヴォ空港の14Rです。他の空港で練習も同様の手順になります。
これからはビデオで撮影してあります。HD画質で再生可能です。
※筆者の操縦は下手です。念のため。
- フライトプラン初期化(00:00-00:15)
FPL(フライトプラン)から1つめのFIXを選択し、99を入力してENTERを押します。
そうするとフライトの経路のみがリセットされます。
※それ以外の項目は流用できるのです! - フライトプラン入力(00:15-00:54)
FPLの1と2に離着陸する空港のICAOコードを入力します。
ドモジェドヴォの”UUDD”を入力してACCEPTします。MENUからARRIVEを選択し、着陸する滑走路を指定します。
今回は離陸する滑走路に四角形を描くように飛んで着陸します。RUNWAYに14Rの選択肢2を入力。
STARは入力せず、APPRに着陸するランウェイのILS付のものを指定します。
羽田等だとXやYが付くものもありますが、簡易離着陸訓練ではどちらでも良いです。
TRANSITIONは空のままにします。FPLに戻ります。 - フライトプラン修正(00:54-01:08)
FPLの画面に戻り、出発のICAOコードの次のウェイポイントがNO LINKになっているはずです。L2をクリックし、R1でDELETEします。
単純にNO LINKを消すだけです。 - NAVの設定(01:08-01:48)
NAVをクリックし、MNVR(マニューバ)を選択します。
次にPVORを選択し、WPT(ウェイポイント)に3つめのウェイポイントを選択します。(3を入力)
RADIALのINBOUNDに着陸滑走路の角度を1度単位で入力します。
簡易に入力する方法としては、Active Runwayに出現した角度。
そう今のヘディングを入力してください。そしてグレアシールドパネルからCOURSEとヘディングに同じ角度を設定します。
もちろん空港チャートで調べて正確に入力しても良いです。
最後にL5のACCEPTをクリックです。
そうすると、ナビゲーション上に滑走路の前後に伸びる線がピンク色で表示されるはずです。
これを基準線として離着陸訓練をします。 - NAVの設定(01:48-01:59)
NAVの画面で、ACT APPRをクリックします。これで着陸時のILS周波数に合わせられます。 - 離陸と旋回(01:59-03:30)
離陸します。ポジティブクライムレートを確認し、ギアアップ。随時フラップを上げていきます。APPを押し、HDGを押します。
離陸時の方位でまっすぐ進むはずです。チュートリアルの滑走路上のフライトをロードしていれば、ALT SELで2000feetが設定され、その高度で上昇が止まります。
そこでスロットルを25%前後にして速度が超過しないようにします。次に進行方向に対して左右任意の方向に90度旋回します。
HDGの角度を設定するだけ。大凡、5マイルほど進んだら、さらに90度旋回し、滑走路と平行して飛行します。5マイルより遠くても良いですが、ナビゲーションから表示される範囲にしましょう。
- アプローチ(03:30-03:59)
そのうちにアプローチのFIXと並行した位置まで飛行するはずです。次にHDGでこのアプローチのFIXに線が被るようにHDGセルを回します。☆が近づいてきて、重なる前にAPPRをクリックします。
距離的にもローカライザーとグライドスロープがキャッチできるはずです。速度を190~200ノットに落とします。
☆に被るあたり(おおよそ10マイル手前)で、フラップ5度。ギアダウン。後は、フラップを10、15と下げていきます。
その際、機体の抗力が上がっていくので、スロットルを上げて速度を維持します。 - ランディング(03:59-終わりまで)
速度はフラップに適した速度にしましょう。基本的には160~200ノットです。
高度1000フィートになったさいに160ノットぐらいで入れるようにします。
降下していく際に、機体も加速していきますので、おそらく10%前後のスロットルにする必要があります。あとはローカライザーとグライドスロープにそって着陸するのみです。
ミニマムまで来たらオートパイロットを解除します。
そのあたりで155ノット前後です。
Q400はスロットルがシビアなので、最初は着陸までオートパイロットを利用して、スロットル調整の練習をしてみてもいいかもしれません。